 OntoTrek 3D Viewer
OntoTrek 3D Viewer
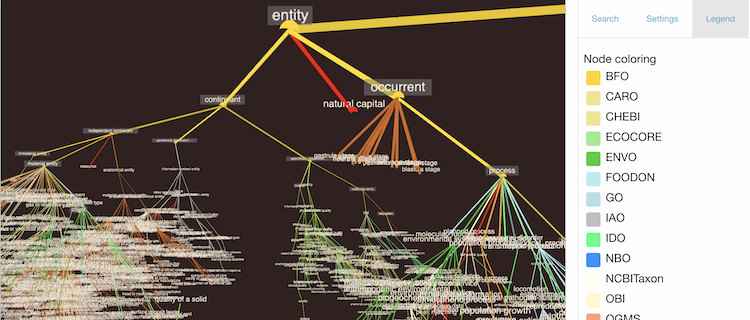
OntoTrek is an OBOFoundry.org ontology terminology viewer that takes advantage of WebGL 3d graph rendering software. We have a few ontologies to choose from during this beta phase, some easy to load like AGRO and ECOCORE, and some big ones like CLO which can only be rendered by applying filters like "wireframe", no "labels", and limiting node depth. Some ontologies demonstrate nice organization under the Basic Formal Ontology (BFO, whose 34 nodes are big, sunny, and always in the same position), and others show an independent streak which may illustrate the difference between reference and application ontologies.
OntoTrek displays class-subclass relations starting from the first top-level entity it finds (usually owl:Thing or BFO:0000001 entity). OntoTrek doesn't draw other object or data properties.
To begin, select an ontology, or enter an ontology URL in upper right "Search" tab and it will be displayed above. Alternately, enter a .owl file URL directly (it must be in rdf/xml format, and can't be a URL that redirects, so for github-hosted ontologies use the "raw.githubusercontent.com/..." link, e.g. https://raw.githubusercontent.com/obi-ontology/obi/master/obi.owl).
This software is being developed at the Centre for Infectious Disease Genomics and One Health at Simon Fraser University. The project's GitHub is here. Contact Damion Dooley for more information.
A) Select a cached ontology to view
B) Or enter a URL to an online ontology
Search for terms to navigate to
Navigate by term context
parent(s)
label
definition
synonyms
UI label
UI definition
Select an ontology to view it; a legend of component ontologies and upper level ontology branches, and the counts of nodes belonging to them, will be displayed here
Experimental: To visualize a disjoint axiom-related unsatisfiability error in a given ontology that you have encountered, copy the reasoning explanation as a set of Markdown formatted statements of form [link label](URL) [relation type] [link label](URL) here, and press "Trace" to see them drawn and highlighted in current ontology. To highlight a common problem, a red link indicates a "Disjoint" axiom between two classes, and an orange link indicates a subClassOf relation between classes. At least one edge of a highlighted loop is incorrect.
Below is a fictional example pertaining to the AGRO ontology (it is also viewable in BFO ontology):
To generate a Markup file that explains a reasoning error in an ontology, install the command line robot tool and run the following robot command. If more than one explanation arises, then choose one to visualize.
> robot explain --input [YOUR ONTOLOGY FILE] --reasoner HermiT --axiom "'[PUT PROBLEM TERM'S rdfs:label HERE]' EquivalentTo owl:Nothing" --explanation output.md
Note that it can take a while to render an ontology, and until rendering is complete, changing settings or attempting to navigate to terms may not work.
Viewport navigation:
While your cursor is positioned over the display viewport, both mouse and trackpad take on the following functions:
Click on a node to focus on it; view will rotate and move towards that item. Clicking on a link will take you to its child (lower depth) node.
Trackpad:
Zoom: 2 finger motion up and down (no motion sideways).
Pan: 2 finger + click and hold mouse. Rotate: 3 finger motion.
Mouse:
Zoom: move + click/hold right button or D key.
Rotate: move + click/hold left button or A key.
Rotate: move + click/hold middle button or S key.